- وبلاگ مرکز اوتیسم جواهرات
- اوراق قرضه ایالات متحده محافظت شده از تورم تجمع کرده است اما همه داستان را خریداری نمی کنند
- خطوط و پیش بینی های ریاضی فارکس
- الگوی صخره ای Hikkake - نحوه ضرب و شتم بازار
- 3 ستون عملکرد تجارت
- 5 راه برای رشد تجارت خود در دنیای Covid-19
- برنامه مربی و کارشناسی ارشد Okex Beacon برای ایجاد فرصت های شغلی در بخش رمزنگاری
- تورنتو آبی جیز در مدیریت بار کار هارون سانچز خلاق است و پارچ را به کلاس یک Dunedin ارسال می کند
- معاملات را بالا ببرید معاملات را بالا ببرید معاملات
- سایه طولانی در شمع تأیید برک آوت

آخرین مطالب
امکانات وب


تکنیک های انیمیشن سنتی اغلب در ضبط دقیق حرکت واقعی انسان ناکام هستند. علیرغم بهترین اهداف یک هنرمند ، جنبش بشر به سادگی پیچیده است تا بتواند با دست ترسیم شود. در اوایل قرن بیستم ، انیماتورها دریافتند که می توانند فیلمی از یک موضوع در حال حرکت بگیرند و با ردیابی جسمی هر قاب فیلم ، فرایندی به نام Rotoscoping را در کارتون کپی کنند. در اواخر دهه 1980 و اوایل دهه 1990 ، روشهای جدید ضبط حرکت یک موضوع به صورت دیجیتالی ایجاد شد. ضبط حرکت نوری (OMC) ، یکی از این روشها برای تبدیل حرکت واقعی زندگی به داده های دیجیتال ، از تعدادی دوربین برای فیلمبرداری یک موضوع از دیدگاه های مختلف استفاده می کند. سپس از این نماها برای بازسازی حرکت به صورت سه بعدی استفاده می شود ، جایی که می تواند در یک مدل رایانه ای اعمال شود.
امروزه از OMC به طور گسترده در انیمیشن و جلوه های ویژه برای تصاویر مهم حرکت استفاده می شود. از فیلم های خانوادگی انیمیشن ، مانند "یک کارول کریسمس" در سال 2009 ، گرفته تا اکشن زنده مانند "آواتار" جیمز کامرون ، از OMC برای گرفتن مزاحمت های عملکرد یک بازیگر استفاده می شود و آنها را به یک شخصیت انیمیشن منتقل می کند. این احساس بیشتری از زندگی و واقعیت را به شخصیت هایی می بخشد که به طور سنتی متحرک هستند. ضبط حرکت همچنین می تواند وسیله ای را برای یک کارگردان فراهم کند تا صحنه های CG را بهتر تجسم کند. بیشتر مناظر وسیع موجود در آواتار کاملاً رایانه ای تولید شده بودند. با استفاده از OMC ، کامرون توانست "دوربین مجازی" را در دست بگیرد و ببیند که چگونه صحنه تغییر می کند زیرا او از نظر جسمی دوربین را از طریق آن جابجا می کرد. این امر به یک کارگردان در هنگام کار با CG ، به یک کارگردان عظیم کنترل خلاقانه می دهد.جیمز کامرون در مجموعه مجازی آواتار. با داشتن "دوربین مجازی" و OMC ، کارگردانان می توانند به راحتی صحنه ای از صحنه CG حرکت کنند و بتوانند یک صحنه واقعی را با یک دوربین واقعی انجام دهند. بدون اجازه از http://www. frankrose. com/work2. htm استفاده می شود
ضبط حرکت نوری چگونه کار می کند؟
OMC از تعدادی دوربین ویژه استفاده می کند که صحنه ای از زوایای مختلف را مشاهده می کند. درست مانند دید دو چشمی به انسان اجازه می دهد تا جهان را در سه بعد ببینند ، استفاده از دو یا چند دوربین با مشاهده همان موضوع به ما امکان می دهد تا آن موضوع را به صورت سه بعدی بازسازی کنیم. در "نشانگر مبتنی بر" نشانگرهای بازتابنده OMC روی بدن بازیگر قرار می گیرند. به دلیل بازتاب آنها ، این نشانگرها به راحتی توسط نرم افزار موجود در دوربین قابل تشخیص هستند. ضبط موقعیت این نشانگرها در محدوده حرکات ، به ما امکان می دهد تا در هر زمان معینی موقعیت بدن بازیگر را تعیین کنیم. از طرف دیگر ، OMC "نشانگر کمتر" سعی می کند بدون استفاده از دستگاه های ردیابی ویژه ، همان کار را انجام دهد. در عوض ، شبح بازیگر از زوایای مختلف مشاهده می شود و برای بازسازی کل بدنه سه بعدی این بازیگر استفاده می شود. در صنعت جلوه های ویژه ، ضبط مبتنی بر نشانگر برای صحت پیگیری نشانگر کمتر از آن است. در قسمت باقیمانده این مقاله ، ما روی OMC مبتنی بر نشانگر تمرکز می کنیم.
شرح پروژه
- تنظیم قبل از ضبط - آماده سازی مرحله و موضوع برای استفاده
- ضبط و کسب داده - ردیابی حرکت موضوع و ایجاد نمایندگی سه بعدی
- ویرایش پس از فرآیند - اتصال داده ها به اسکلت شخصیت شبیه سازی شده
من یک نمونه کوچک یک بعدی از الگوریتم تشخیص و ردیابی نشانگر را اجرا کرده ام که بعداً به عنوان نمونه از آن استفاده خواهم کرد. نمونه در MATLAB نوشته شده است و برای بارگیری در دسترس است.
تنظیم قبل از ضبط
تجهیزات
ضبط حرکت با کیفیت بالا نیاز به یک تنظیم به همان اندازه با کیفیت دارد. دوربین های با سرعت بالا در مرحله ضبط قرار می گیرند تا به بهترین وجه عملکرد بازیگر را ببینند. این بازیگر مجهز به نشانگرهای بی شماری است تا هر حرکتی که ممکن است انجام دهد توسط دوربین ها اسیر شود. داده های حاصل از عملکرد سپس به ایستگاه های داده عظیم ارسال می شود که موقعیت هر نشانگر را به صورت سه بعدی بازسازی می کند. مرحله ضبط اگرچه مرحله ای که ضبط حرکت در آن صورت می گیرد ، در واقع نقش فعال در فرآیند ضبط بازی نمی کند ، اما برای تضمین بهترین نتیجه ، هنوز تعدادی از ملاحظات ویژه باید انجام شود. اولین موردی که باید مطرح شود دقیقاً این است که منطقه ضبط چقدر بزرگ خواهد بود. اگر منطقه خیلی کوچک باشد ، بازیگر اتاق کافی مانور کافی نخواهد داشت ، خیلی بزرگ و دوربین ها در انتخاب نشانگرهای کوچک مشکل دارند. اندازه استودیو پس از آن تابعی است که به همراه کیفیت و کمیت دوربین های موجود ، چقدر نیاز به ضبط جزئیات دارد. هنگامی که منطقه ای که باید ضبط شود بسیار بزرگ است ، می توان فضا را به چندین "منطقه ضبط" تقسیم کرد [1]. هر منطقه دارای تعدادی دوربین اختصاصی است که فقط نشانگرهایی را در آن منطقه ضبط می کنند. این داده ها را می توان به هم بخیه داد تا اطلاعات کامل برای کل حرکت را بدست آورید.
میزان نور در منطقه ضبط نیز باید با دقت کنترل شود. پخش نور محیط در اتاق باعث کاهش تأثیر بازتاب های ولگرد در فرآیند ضبط می شود. هرگونه بازتاب روشن در اتاق را می توان با دوربین ها به عنوان نشانگرهای جدید برداشت و مشکل در تشخیص و ردیابی را به شدت افزایش داد. نورپردازی یکنواخت در کل مرحله نیز لازم است ، به طوری که نشانگرها در کل منطقه ضبط یکسان ظاهر می شوند. یک پس زمینه رنگ جامد اغلب در اطراف منطقه ضبط قرار می گیرد تا از هرگونه اشیاء پس زمینه استفاده کرده و دید نشانگر را افزایش دهد.
دوربین ها برای جلوه های ویژه رده بالا، OMC از دوربین هایی استفاده می کند که مخصوص این کار ساخته شده اند. این دوربین ها باید تعادلی بین تصاویر با وضوح بالا و سرعت شاتر سریع ایجاد کنند. بنابراین، انتخاب دوربین بر اساس حرکتی است که باید ثبت شود. دوربین های با وضوح بالاتر می توانند ژست های کوچک تر را بهتر تشخیص دهند و مناطق عکس برداری بزرگ تری را به خاطر سرعت شاتر در خود جای دهند. از طرف دیگر، دوربین های سریع تر می توانند میزان تاری ناشی از حرکت سریع سوژه را کاهش دهند، اما به قیمت قدرت تفکیک. بنابراین، حرکات گسترده تر مانند راه رفتن یا مبارزه، به دوربین سریع تری نیاز دارند، در حالی که عملکردهای دقیق تر، مانند لبخند زدن یا اخم کردن، به دقت دوربین های با وضوح بالا نیاز دارند.
متخصص «MoCap» برنده جایزه اسکار، Vicon، برخی از بهترین دوربین های فیلمبرداری از حرکت را در صنعت تولید می کند. مدل برتر Vicon T160 آنها قادر به گرفتن تصاویر 16 مگاپیکسلی با سرعت 120 فریم در ثانیه است [2]. هنگامی که به شاتر سریع تری نیاز است، وضوح را می توان کاهش داد تا سرعتی تا 2000 فریم در ثانیه به دست آورد.
دوربین ها مجهز به چراغ های بارق ویژه هستند که برای دید آسان از نشانگرها منعکس می شوند. در حالی که این نورهای بارق می توانند نورهای طیف مرئی باشند، مانند آنهایی که در عکاسی استودیویی استفاده می شود، استفاده از نورهای مادون قرمز به جای آن تبدیل به یک روش معمول شده است. میزان تداخل محیط در طیف مادون قرمز به طور قابل توجهی کمتر از طیف مرئی است. با فیلتر کردن تمام نور محیط، دوربین قادر است به راحتی بین نشانگرهای بازتابنده و پس زمینه تمایز قائل شود.
نشانگرها و کت و شلوار ضبط نوع نشانگرهایی که تا کنون در مورد آنها بحث کرده ایم معمولا "نشانگرهای منفعل" نامیده می شوند. نشانگرهای غیرفعال منعکس کننده هستند و نور را به سمت دوربین ها بازتاب می دهند که می توان آنها را شناسایی کرد. به عنوان جایگزین، «نشانگرهای فعال» از LED هایی استفاده می کنند که نور را به سمت دوربین می تابانند. هر نشانگر فعال می تواند با فرکانس منحصر به فردی چشمک بزند که ردیابی نشانگر را آسان تر می کند. با این حال، این مستلزم آن است که بازیگر در مجموعه ای از سیم ها برای کنترل هر یک از LED ها مناسب باشد. نشانگرهای غیرفعال به بازیگر آزادی و دامنه حرکت بیشتری می دهند. نشانگرها باید جایی باشند که پوست به استخوان و نزدیک مفاصل نزدیکتر باشد تا بتواند حرکت دقیق را بازتولید کند. این معمولاً به این معنی است که بازیگران باید یک لباس اسپندکس چسبان که نشانگرها به آن وصل شده است، داشته باشند. برای حرکت کامل بدن، معمولاً چیزی در محدوده 50 نشانگر لازم است [CITE GUERRA].
برای نمونه من از 8 قطعه نوار بازتوری به عنوان نشانگرهای بالای بدن استفاده کردم
کالیبراسیون دوربین
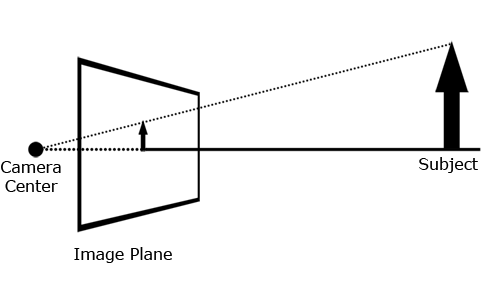
فیزیک حاکم بر عملکرد داخلی یک دوربین اغلب برای مدل سازی دقیق بسیار دشوار است. در عوض ، ما از نظر ریاضی یک دوربین واقعی را به عنوان یک دوربین نظری "سوراخ سوراخ" نشان می دهیم [4]. نور یک موضوع را خاموش می کند و وارد دوربین در مرکز دوربین می شود (آنالوگ نظری به دیافراگم) و بر روی صفحه تصویر (سنسور CCD) پیش بینی می شود. این در تصویر زیر نشان داده شده است. فلش بزرگ در سمت راست بیانگر شیئی است که در جهان می بینیم. با عبور از دوربین ، روی صفحه تصویر پیش بینی می شود.`نمودار یک دوربین سوراخ سوراخ. توجه کنید که هواپیمای تصویر در مقابل مرکز دوربین نشان داده شده است. این برای راحتی است ، اما بر عملکرد ریاضی دوربین تأثیر نمی گذارد.
بگذارید X یک 4 بردار همگن در مختصات دوربین از یک موقعیت در جهان باشد:

ما می توانیم نقطه ای را در هواپیمای تصویری پیدا کنیم که X توسط آن طراحی شود:

جایی که x بازنمایی 3 بردار از مختصات تصویر 2D و P یک ماتریس طرح ریزی 3x4 است. همانطور که از نام های آن پیداست ، ماتریس طرح ریزی چگونگی پیش بینی نقطه واقعی در صفحه تصویر را تعیین می کند. با استفاده از مثلث های مشابه در دوربین سوراخ پین ما ، ما می توانیم دریابیم که P به سادگی است:
![[ left[ <x08egin</p><p> f,0,0,0 \ 0,f,0,0 \ 0,0,1,0 \ end>
ight] ]](http://physbam.stanford.edu/cs448x/old/attachments/Optical_Motion_Capture_Guide/latex_7ac63e1fbb7a71f6b7c0d1194ec99a443526b7ae_p1.png)
در اینجا f فاصله کانونی دوربین است. البته این بازنمایی ساده بسیاری از روشهای پیچیده را که نور با لنز و سنسور در تعامل است ، نادیده می گیرد. در واقعیت ، ماتریس طرح ریزی برای یک دوربین اگر بسیار پیچیده تر باشد. یک دوربین واقعی با 11 پارامتر ذاتی و بیرونی تعریف شده است. پارامترهای ذاتی می گویند که چگونه یک نقطه جهانی در صفحه تصویر دیده می شود و پارامترهای خارجی می گویند که چگونه دوربین در جهان جهت گیری می شود. بگذارید K یک ماتریس کالیبراسیون 3x3 باشد که 5 پارامتر دوربین داخلی را در خود جای داده است. به همین ترتیب ، بگذارید [r | t] یک ماتریس تحول 3x4 باشد که چرخش (R) و ترجمه (t) را که توسط 6 پارامتر خارجی تعریف شده است ، کنترل می کند. بنابراین ، ما می توانیم ماتریس طرح ریزی P را دوباره تعریف کنیم:
![$P=K[R|t]$](http://physbam.stanford.edu/cs448x/old/attachments/Optical_Motion_Capture_Guide/latex_70e03f260ca356ed3a1dcbe74d268feb305536ce_p1.png)
P هنوز یک ماتریس طرح ریزی 3x4 است ، اما ما اکنون از یک درجه آزادی (فاصله کانونی) به 11 درجه آزادی رفته ایم! 11 درجه آزادی باید از طریق فرآیندی به نام کالیبراسیون دوربین به صورت تجربی یافت شود.
کالیبراسیون کلاسیک [4] ما می توانیم با حل معادله زیر برای P: این معادله مشابه قبلی باشد ، ماتریس طرح ریزی یک دوربین را پیدا کنیم: این همان معادله ای است که قبلاً ، اما ما X را به عنوان بازنمایی همگن 3 بردار آن نوشتیم. برای حل این مسئله ، ما باید مختصات سه بعدی یک نقطه در فضا (x) و نقطه تصاویر مربوطه (x) را بدانیم. بازنویسی این برای حل برای P ما: ردیف I-th از P. کجاست زیرا فقط دو معادله شناخته شده و 12 ناشناخته وجود دارد ، این راه حل برای یک نقطه واحد کم ارزش است. در حقیقت ، ما حداقل به شش مکاتبات نقطه ای نیاز داریم تا بتوانیم راه حلی پیدا کنیم. ما این 12 مکاتبات را با استفاده از "شیء کالیبراسیون" دریافت می کنیم. این در اصل یک تخته بزرگ از اندازه شناخته شده است که ما جلوی دوربین نگه می داریم. اگر ما فاصله واقعی بین گوشه های تخته چک را بدانیم می توانیم موقعیت های نسبی آنها را در جهان تعیین کنیم. دانستن موقعیت های نسبی جهان و موقعیت های دقیق تصویر از نقاط خاص در صفحه ، مکاتبات نقطه ای به اندازه کافی برای انجام محاسبه به ما می دهد.
حال اجازه دهید ما به تعریف خود از P برگردیم:

اگر به دوربین اجازه دهیم که در منشاء باشد و به گونه ای گرا باشد که محور اصلی آن به موازات محور x باشد ، می توانیم به راحتی K را پیدا کنیم.

از الگوی چکمه ای برای یافتن ماتریس طرح ریزی دوربین دیجیتال من استفاده می شود.
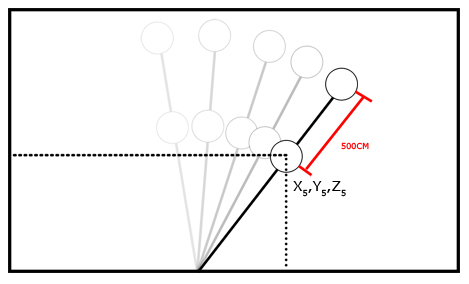
کالیبراسیون خودکار [5 روش کلاسیک واقعاً برای موقعیت هایی با یک یا دو دوربین خوب کار می کند ، اما برای ضبط حرکت مناسب نیست. با استفاده از دوربین هایی که در همه موقعیت های اطراف مرحله ضبط ما قرار دارند ، تخته چک کننده فقط در هر زمان با چند دوربین قابل مشاهده است. به منظور کالیبراسیون دوربین ها به عنوان یک واحد ، باید هر یک از کالیبراسیون ها را به هم زنجیر کنیم. اگرچه یک کالیبراسیون واحد ممکن است دقیق باشد ، انجام محاسبه به طور مکرر یک فرآیند مستعد خطا است. در عوض ، یک تکنیک جدید ایجاد شد که به همه دوربین ها اجازه می دهد به طور خودکار و یکباره کالیبراسیون کنند. به جای استفاده از یک الگوی چکمه ، شخصی که سیستم را کالیبره می کند ، یک گرز را با دو نشانگر بازتابنده از فاصله مشخصی از هم جدا می کند. این دو نقطه توسط هر دوربین به طور هم زمان قابل مشاهده است. اگر فاصله بین دو نشانگر را بدانیم ، دو نقطه در سیستم مختصات جهان می دانیم. با جابجایی خواسته بر روی تعدادی فریم ، ما قادر به جمع آوری نقاط کافی برای محاسبه ماتریس طرح ریزی هستیم. باز هم ، ما فرض می کنیم که R ماتریس هویت است و T یک بردار صفر است ، به ترتیب نسبت به محاسبه شده ما برابر با K.همانطور که میله کالیبراسیون در صحنه حرکت می کند، می توانیم تعیین کنیم موقعیت نشانگرهای آن با توجه به فاصله نسبی بین نشانگرها
قاب مختصات دوربین به قاب مختصات جهانی در هر دو طرح کالیبراسیون که تا کنون مورد بحث قرار گرفته ایم، K را با فرض سیستم مختصات دلخواه پیدا کردیم. برای دریافت دوربین ها در ارتباط با سیستم جهانی مختصات، یک مرحله دیگر از کالیبراسیون مورد نیاز است. یک قاب هم ترازی مختصات بر روی زمین در منطقه ضبط قرار می گیرد. به طور معمول این قاب تراز یک جسم L شکل با نشانگرهایی در دو انتها و در وسط است. همانطور که ماتریس کالیبراسیون را قبلاً می دانیم، می توانیم مقادیر X, Y در دنیای واقعی هر یک از نشانگرها را در قاب تراز تعیین کنیم. ما همچنین فاصله بین نشانگرها را در قاب تراز می دانیم که به ما امکان می دهد مختصات Z هر نشانگر را محاسبه کنیم. سپس چرخش و ترجمه به عنوان چرخش و ترجمه مورد نیاز برای انتقال سیستم مختصات دوربین به نشانگر تراز یافت می شود.
ضبط عملکرد
زمانی که مرحله قبل از فیلمبرداری کامل شد، می توانیم کار واقعی ضبط حرکات بازیگر را آغاز کنیم. این ابتدا ما را ملزم می کند که به طور خودکار همه نشانگرهای قابل مشاهده برای هر دوربین را انتخاب کنیم. نشانگرها می توانند در هر موقعیتی در مرحله عکسبرداری و در هر زاویه ای نسبت به دوربین ظاهر شوند. الگوریتم تشخیص نشانگر ما باید برای یافتن دقیق نشانگرها به اندازه کافی قوی باشد. هنگامی که موقعیت نشانگرها مشخص شد، باید بتوانیم نشانگرها را در طول زمان ردیابی کنیم. تطبیق نشانگرها در یک فریم با آنها در فریم بعدی با ورود یا خارج شدن نشانگرها به چالش بیشتری تبدیل می شود. سپس موقعیت های سازنده محاسبه شده توسط هر دوربین با هم ترکیب می شوند تا بازسازی سه بعدی نقاط دوبعدی به دست آید.
تشخیص نشانگر

تشخیص نشانگر با کم کردن بخش ثابت پس زمینه آغاز می شود. این بیشتر نقاط روشنی را که با منطقه عکسبرداری واقعی مرتبط نیستند حذف می کند. با در نظر گرفتن یک تصویر تنها از پس زمینه، می توانیم تفاوت تصویر را به این صورت محاسبه کنیم: دوربین های دیجیتال تمایل دارند مقدار مناسبی از نویز را ثبت کنند، بنابراین مقادیر RGB هر پیکسل پس زمینه ممکن است در طول فرآیند عکس برداری کمی تغییر کند. ما می توانیم فوراً تفریق پس زمینه خود را با حذف میانگین پیکسل های پس زمینه در n فریم آخر بهبود ببخشیم: اجرای من از فرآیند تشخیص نشانگر با کم کردن میانگین مقدار پیکسل 100 فریم اول ویدیو شروع می شود. نتیجه را می توان در زیر مشاهده کرد:تصویر تفاوت با کم کردن تصویر اول پیدا شد100 فریم فیلم پس زمینه.از پیکسل های باقی مانده ، آنهایی که نشانگرها را نشان می دهند باید درخشان ترین باشند. استفاده از آستانه باینری برای تصویر ، ما را با تعدادی از موقعیت های ممکن به ما می دهد:پس از تفریق پس زمینه و آستانه پیش زمینه اعمال می شود ما با هشت موقعیت نشانگر صحیح (سبز) و یک موقعیت نادرست (قرمز).حتی پس از گرفتن آستانه پیش زمینه ، هنوز هم ممکن است برخی از نشانگرهای نادرست شناسایی شده وجود داشته باشد. ما می توانیم برخی از این موارد را با نیاز به قطر نشانگر ممکن بین یک محدوده خاص از بین ببریم. در تصویر بالا ، نشانگر نادرست مشخص شده را از بین می برد و ما را با یک تصویر با برچسب درست رها می کند. گفته می شود که موقعیت هر نشانگر سانتروئید منطقه است که توسط قسمت قابل مشاهده نشانگر تعریف شده است.بعد از تفریق پس زمینه و پیش زمینه ما به راحتی قادر به یافتن نشانگرهای بالقوه هستند فیلم کامل را ببینید:DetectionMovie. mpg آزمایشات من با تشخیص نشانگر در جایی که به اندازه کافی کنترل می شود که این الگوریتم ساده به طور مداوم کار می کند. یک سیستم حرفه ای شامل تعدادی روش اضافی برای تشخیص نشانگر است که باعث افزایش استحکام آن می شود.[استناد Guerra] تعدادی روش اضافی را پیشنهاد می کند:
- تشخیص silhouette با محاسبه گرادیان تصویر: هر نشانگر بالقوه باید در محیط تعریف شده توسط شبح بازیگر باشد.
- تشخیص گوشه: اگر از نشانگرهای مربع استفاده می شود ، هر الگوریتم تشخیص گوشه باید بتواند آنها را پیدا کند. سپس ، هر موقعیت نشانگر به عنوان میانگین چهار گوشه ای که آن مربع را تشکیل می دهند تعریف می شود.
ردیابی نشانگر
- نشانگر A از فریم I-1 با نشانگر A در قاب I ، اگر فاصله (A ، A ') مطابقت دارد
پس از فرآیند
کنترل شخصیت
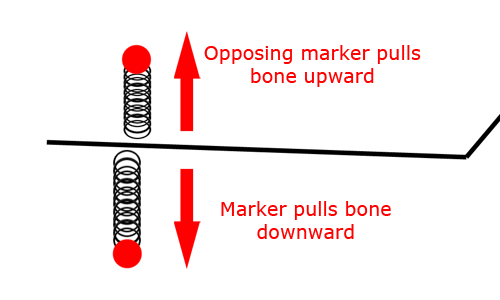
حتی با قرار دادن مناسب نشانگر و الگوریتم های ردیابی خوب ، داده های ضبط عملکرد کاملاً آماده استفاده نیست. ما می خواهیم داده های سه بعدی را در یک اسکلت مجازی از شخصیتی که می خواهیم تحریک کنیم ، اعمال کنیم. با حرکت یک نشانگر در داده ها ، ما به آن نیاز داریم تا استخوان اسکلتی مربوطه را به همراه آن حرکت دهد. مدل بهار با توجه به نشانگرهای کافی می توانیم با استفاده از یک مدل بهار ساده موقعیت هر استخوان را پیدا کنیم. تصور کنید که هر نشانگر به عنوان چشمه ای به آن وصل شده است که روی استخوان می کشد. شکل زیر نشان می دهد:مدل بهار برای تعامل با استخوان نشانگر چشمه های مخالف استخوان را در جای خود نگه می دارندبا حرکت یک نشانگر ، چشمه ای که به آن کشیده شده است و باعث می شود استخوان به سمت نشانگر کشیده شود. با این حال ، نشانگرها در طرف مقابل استخوان ، یک نیروی متضاد را اعمال می کنند که مانع از حرکت بیش از حد استخوان می شود. به این ترتیب ، سر و صدای تصادفی در اندازه گیری موقعیت نشانگر ما با میرایی سیستم بهار لغو می شود. سینماتیک معکوس هنگام استفاده از تعداد کمتری از نشانگرها ممکن است اطلاعات کافی برای استفاده از مدل بهار نداشته باشیم. به جای اینکه به سینماتیک معکوس اعتماد کنید. حرکت بدن انسان توسط تعدادی از قوانین مکانیکی دیکته می شود. به عنوان مثال ، اگر بازیگر زانوی خود را بلند کند ، هر دو پای فوقانی و تحتانی او به همین ترتیب جابجا می شوند. در این شیوه می توانیم تعیین کنیم که چگونه تمام اتصالات موجود در بازیگر مطابق با موقعیت سایر مفاصل حرکت می کنند. معادلات مورد نیاز برای سینماتیک معکوس بسیار پیچیده تر از نمونه هایی است که حاکم بر مدل بهار است ، اما به هر مفصل نیاز به نشانگرهای کمتری دارند. به طور معمول ، این تکنیک ها با اتصال آزاد استخوان ها به نشانگرها ترکیب می شوند. معادلات سینماتیک معکوس هنوز محاسبه می شوند ، اما سیستم کلی سیستم محدودتر است زیرا نشانگرها به طور مستقیم به استخوان ها وصل نمی شوند.
ویرایش حرکت
در این مرحله حرکات ضبط بازیگر ما می تواند برای یک شخصیت سه بعدی اعمال شود. یکی از مزایای ضبط حرکت این است که انیماتورها می توانند به منظور دستیابی به حرکات مطلوب تر ، داده های حرکت را به صورت دستی تغییر دهند. به عنوان مثال ، فرض کنید ما برای شخصیت شرور فیلم خود ضبط حرکت صورت را انجام می دهیم. ما می خواهیم شخصیت ویژگی های یک شخص واقعی را داشته باشد ، مانند لبخند شیطانی او. با این حال ، پس از ضبط ، انیماتورها تصمیم می گیرند که می خواهند ژست لبخند حتی به دنبال شرارت باشد. ویرایش حرکت به انیماتورها اجازه می دهد تا نحوه داده های حرکت واقعی وارد شوند و اصلاح کنند. این باعث تعادل بین خلاقیت هنرمندان و واقع گرایی یک بازیگر می شود.
رمز نمونه
- فایل zip را بر روی رایانه محلی خود بارگیری و
- Matlab را باز کنید و نمونه را به مسیر پرونده خود اضافه کنید
- اجرا کنmocapgui ()

ما را در سایت فارکس کاران ایران دنبال می کنید
برچسب :
نویسنده : ديناروند فهيمه
بازدید : 33
